PWM学习笔记
深入理解PWM(脉宽调制)
1. 什么是PWM?
PWM,即脉宽调制(Pulse Width Modulation),是一种电子技术,通过调节电信号的高电平持续时间和低电平持续时间来控制输出信号的强度或表现形式。它是一种周期性的波形,周期内包含了高电平和低电平两种状态。
2. PWM的重要参数是什么?
在PWM中,有两个非常重要的参数:
- 周期(T):表示PWM波形一个完整周期所持续的时间长度。
- 占空比(Duty Cycle):指高电平在一个周期内所占的比例,通常用百分比表示。
3. PWM的应用场景有哪些?
PWM技术被广泛应用于各种领域,包括:
- 通信领域的脉宽调制技术。
- LED照明领域中,可以通过PWM波形来调节LED灯的亮度,实现调光效果。
- 控制蜂鸣器、电机等设备,控制其工作状态和频率。
4. PWM波形是如何产生的?
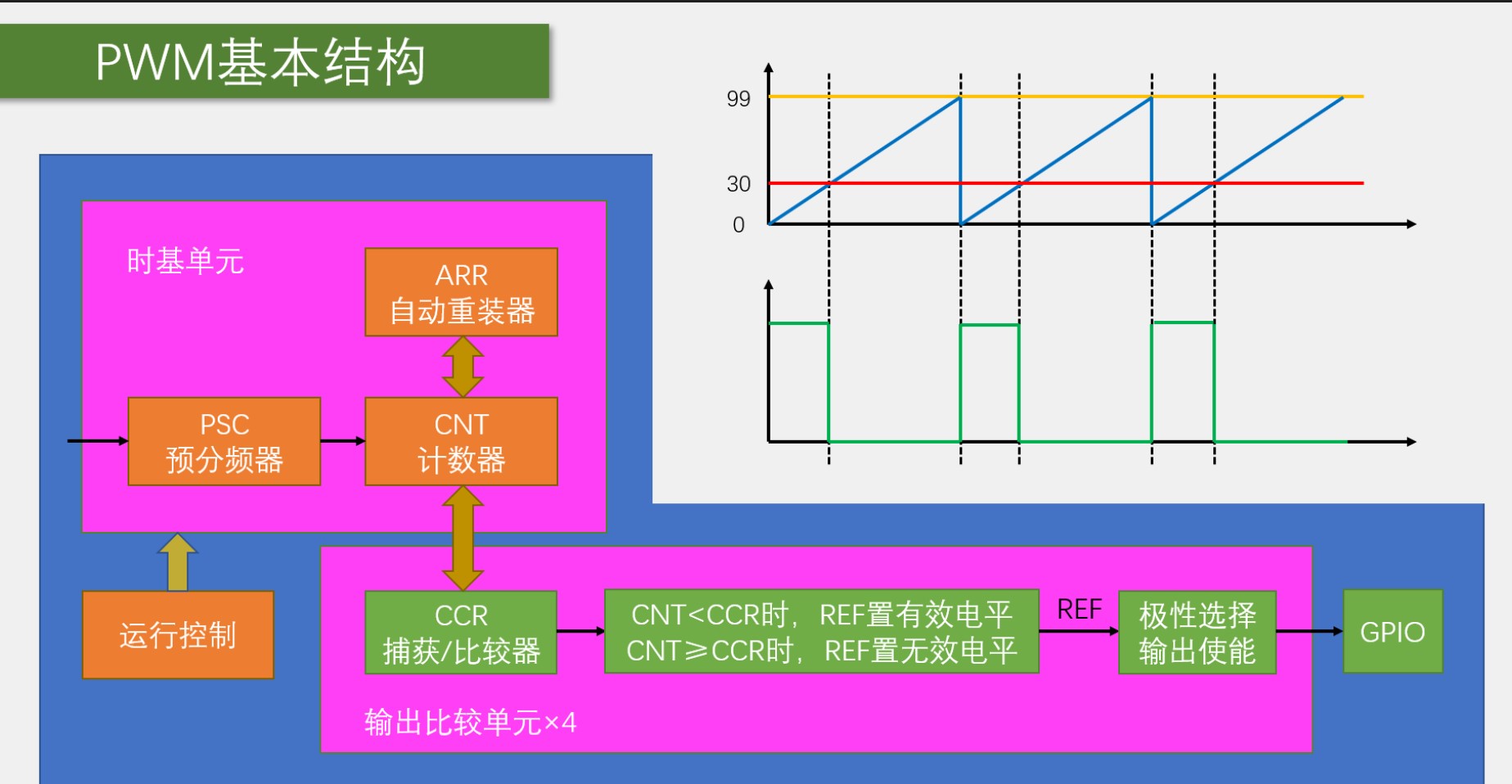
4.1 基本原理
PWM波形的生成基于定时器和GPIO引脚。通过配置定时器产生高低电平信号,并通过GPIO引脚输出,从而形成PWM波形。
4.2 早期实现方式
在早期的简单单片机中,由于没有专用的PWM定时器,需要手动结合GPIO和定时器模块来生成PWM波形。
4.3 现代实现方式
现代单片机通常内置了PWM模块,将定时器和GPIO引脚绑定,通过寄存器配置即可产生PWM波形,操作更加简便。
5. 生成PWM波形的步骤是怎样的?
- 设置PWM的周期和占空比。
- 系统时钟通过二级分频后与周期相乘,得到PWM波形的实际周期。
- 根据设定的占空比,确定PWM波形的高电平持续时间和低电平持续时间。
6. 注意事项
- 在配置PWM时,需要根据实际需求设置合适的周期和占空比,以达到所需的控制效果。
- 系统时钟的设置和分频情况也需要考虑,以确保PWM波形的稳定和准确输出。
通过了解PWM的原理和应用,我们可以更好地利用这项技术来实现各种电子设备的控制和调节。
7.stm32关于pwm
8.代码步骤
1.开启时钟源
1 | RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟 |
2.GPIO初始化配置
1 | /*GPIO初始化*/ |
3.配置时钟源 TIM
1 | TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟 |
4.输出比较初始化
1 | TIM_OCInitTypeDef TIM_OCInitStructure; //定义结构体变量 |
5.TIM使能
/TIM使能/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
6.强制修改CCR(影响占空比)的值
1 | TIM_SetCompare3(TIM2, Compare); //设置CCR3的值 |
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.